Selected Projects
A complete list of publications can be found on the Publications page.
Aerobatic Trajectory Generation and Tracking for Fixed-Wing VTOL Aircraft

- AIAA Aviation Forum, 2021 (Best Student Paper in V/STOL Aircraft Systems) Video, PDF
- AIAA Journal of Guidance, Control, and Dynamics (JGCD), October 2022 Video, PDF
- arXiv Pre-print, 2022 Video, PDF
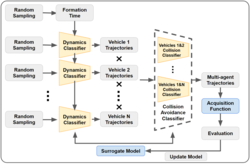
Cooperative Multi-Agent Trajectory Generation
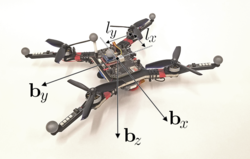
Flight Control for Aggressive Quadcopter Trajectories
- IEEE Conference on Decision and Control (CDC), 2018 PDF
- IEEE Transactions of Control Systems Technology (T-CST), 2021 Video, PDF
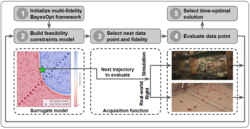
Multi-Fidelity Bayesian Trajectory Optimization
- Robotics: Science and Systems (RSS), 2020 (Finalist Best Student Paper) Video, PDF
- The International Journal of Robotics Research (IJRR), 2021 Video, PDF, GitHub
FlightGoggles: Photorealistic Simulation for Perception-driven Robotics

- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019 PDF
- arXiv Pre-print, 2021 Video, PDF, GitHub